近日,集度用于汽车机器人开发的软件集成模拟样车JiDU SIMUCar已成功融通城市、高速域智能驾驶功能。这意味着,集度依照自身独特的、开创性的“汽车机器人开发流程”高效完成了智驾研发目标,在集度成立10个月之际,就完成了行业领先的高速、城市双域智驾融通,提前验证了量产L4级自动驾驶能力的安全可靠。目前,集度汽车机器人的“大脑”已初步具备“自由移动”能力,正为2023年量产上市做足充分准备,交付时即可完整提供给用户领先、安全可靠的自动驾驶体验,而非在交付后再通过OTA的方式来提供。

当天,集度和百度Apollo团队进行了2021年底最后一次自动驾驶常规测试来验证集度汽车机器人的“大脑”状态。在全长25公里的测试路线上,SIMUCar完整测试了红绿灯识别、直行、右转、有保护左转、通过丁字路口以及上下匝道等自动驾驶场景。本次测试历时40分钟,途径39个城市道路路口、55个人行横道、30个红绿灯,在13公里的城市道路和12公里高速道路上,实 现了4次左转、5次右转和4次上下闸道,全部自动驾驶场景已顺利安全跑通,初步具备了相应场景的自由移动能力。
集度是一家顶尖的科技创业公司,致力于创造值得信赖、可自我进化的汽车机器人。在成立的第207天,集度就推出了软件集成模拟样车SIMUCar(Software Integration Mule Car),展示了集度独特的“汽车机器人开发流程”。集度开创性地将汽车机器人的大脑开发、神经开发、躯干打造等研发环节进行全解耦(拆分),并通过SIMUCar模拟真实的整车运行环境,以此实现软硬件独立、并行的多线程高效开发。这一创新一改过去三电及底盘系统先行、智能化软件研发后置的瀑布式单线程传统开发模式,在汽车研发领域极具颠覆意义,此举能够大幅缩短智能汽车的研发周期。
集度会承载Apollo最新的自动驾驶技术,还将基于集度的产品定义需求定制化设计研发。得益于百度超2100万公里的自动驾驶安全路测,以及领先的全栈AI技术赋能,集度正在以超越行业平均水平的速度落地打造汽车机器人。
在2021年12月27日举办的的百度Create 2021(百度AI开发者大会)上,百度创始人、董事长兼CEO李彦宏表示,集度的汽车机器人贯穿了“自由移动、自然交流、自我成长”三大产品理念。第一,汽车机器人拥有L4级别的自动驾驶能力,可自由移动;第二,人车交互及语音语义的精准识别,让车与人能“自然交流”,理解用户情绪,实时响应用户需求;第三,汽车机器人可以根据用户的使用习惯来进行自我的学习和迭代不断优化自动驾驶及智能座舱体验,实现“自我成长”。

其中,“自由移动”即L4级自动驾驶能力,由集度领先的智能驾驶系统支持。该系统覆盖全域自动驾驶场景,在高速、城市开放道路中提供行业领先、安全可靠的自动驾驶功能。集度智驾系统的开发采用类似于互联网软件的敏捷开发模式,通过需求、设计、开发、测试、发布的快速闭环,以“周”为单位进行快速迭代。这种迭代速度在量产后也将继续保持,而且更多需求将来源于用户的实际反馈,通过AI、大数据驱动自我学习迭代。
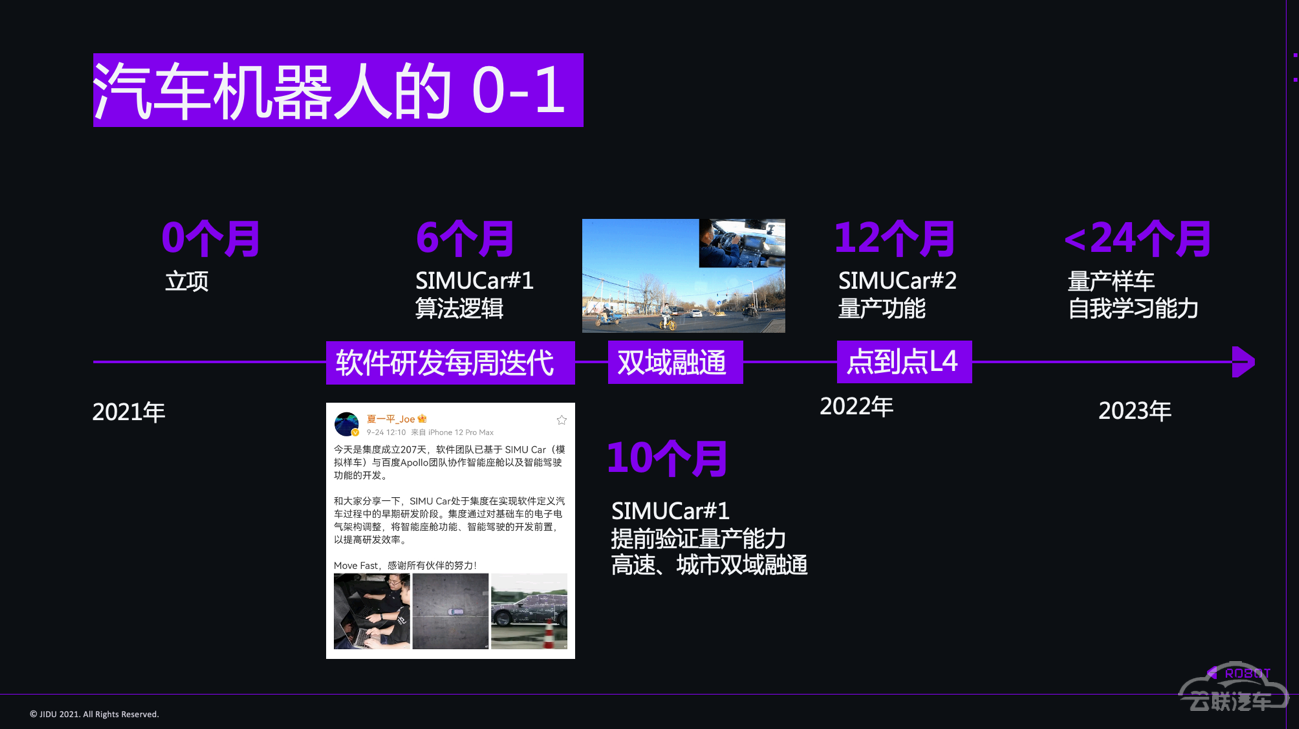
集度智驾系统开发会经历算法逻辑、量产功能、量产样车自我学习能力三个开发阶段。2021年9月底,集度开展SIMUCar开发工作,集度开始通过SIMUCar开发汽车机器人智能驾驶算法逻辑。11月,集度SIMUCar已进入到动态测试阶段,通过“周更”实现了信号灯识别、路口右转、夜间行驶等功能。在12月,SIMUCar又陆续更新了路口左转、自主避障、自主变道、自主靠边、自动上下闸道等在城市域和高速域可以高频使用的智能驾驶功能。
预计2022年的2-3月份,集度智驾将借助SIMUCar开展量产功能开发,进入汽车机器人开发的下一阶段。届时,集度自研的电子电气架构JET和SOA、自动驾驶系统、核心算力平台、相关传感器都会向量产状态进一步迭代。在这个阶段,集度汽车机器人将具备城市域、高速域融通的L4级自动驾驶能力,可以做到点到点自动驾驶,并满足量产需求。
集度将在2022年北京车展上展示首款汽车机器人的概念车,首款量产汽车机器人将在2023年上市交付。
免责声明:本站登载此文仅出于信息分享,并不意味着赞同其观点及其描述,不承担侵权行为的连带责任。如涉及版权等问题,请与我们联系(联系QQ:26887486),我们将及时删除处理。